- 返回首页
-
Q系列人形机器人会射箭、挑菜、拿水……真的有点“赛博”了!
时间:2024-03-26 来源:原创/投稿/转载作者:管理员点击:
前不久,由中国科学院自动化所设计研发的多台Q系列人形机器人样机集中亮相,并初步实现了面向不同场景的技术验证。Q系列人形机器人究竟长什么样?又有哪些特点和能力?
Q系列五兄弟是各有所长。人形机器人,相比其他机器人,在结构设计、硬件构成、控制算法、核心性能要求等方面,有很大的差异,也能够实现更多像人一样的能力。跟随记者走进中国科学院自动化所的多模态人工智能系统全国重点实验室,和人形机器人来一场近距离的互动。
中国科学院自动化所高级工程师 陈萌:首先是机器人和大模型结合的能力,我们训练了有两三个月的时间。另外,它通过视觉,能够自觉根据逻辑推理,准确地识别输入它需要拿到什么蔬菜。第三个是它可以通过视觉,又反馈到机器人的运动上,机器人去主动拿到我们随机摆放的蔬菜。
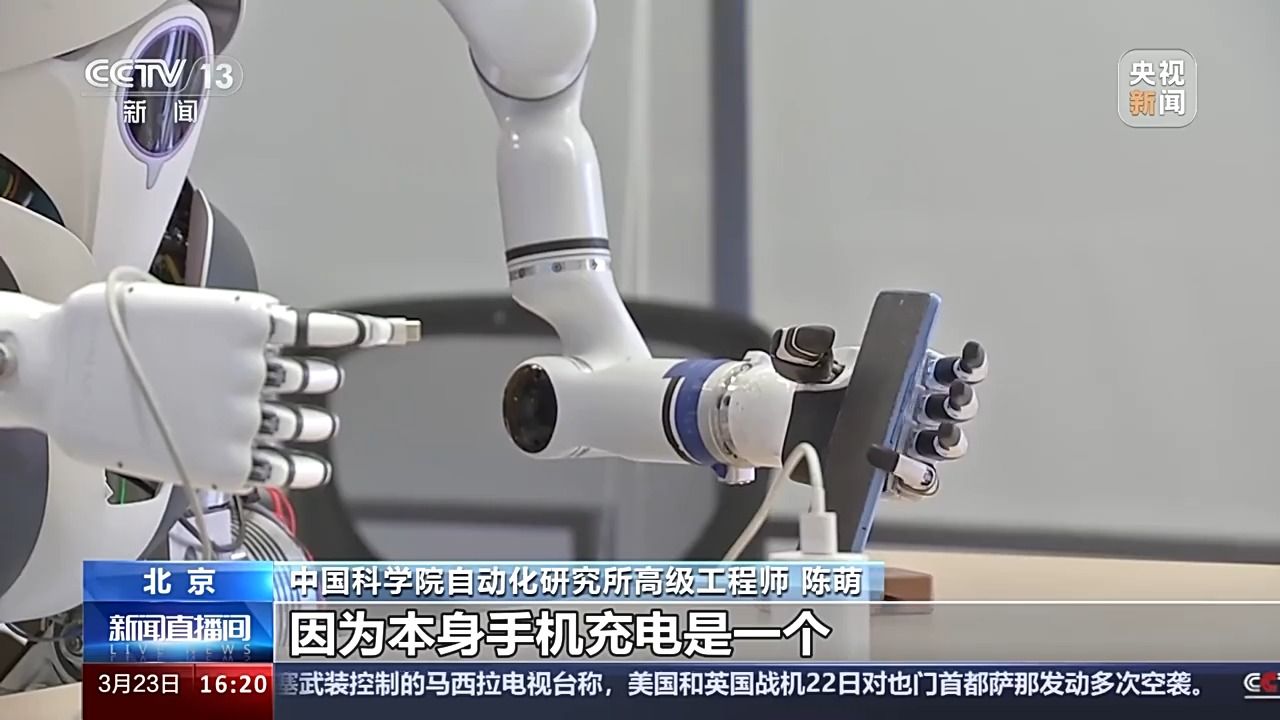
中国科学院自动化所高级工程师 陈萌:对机器人来说还是挺难的。因为手机充电是高精度的插接动作,插接精度是亚毫米级的。机器人本身,不管是感知的摄像头的精度、本身定位精度,都是不足以达到的。我们团队基于环境吸引域理论的基础上,重新定义了一些位置约束和力约束,让机器人能够准确地把充电头插到我们的手机里面。
中国科学院自动化所高级工程师 陈萌:环境吸引域是基于一些环境里面的一些约束,让运动的算法的动作,逐渐地去收敛到插接的位置里面,就像是一个碗的形态,把一个小球扔到碗里面,在没有任何控制的情况下,它会逐步地静止到碗底。

总台央视记者 帅俊全:在我身旁就是Q1人形机器人,现在它要执行一项非常具有挑战性的任务,就是射箭。科研人员已经把箭和弓递到了我们的Q1手上,现在距离箭靶可以看到大概是三米,而且你看它也都已经拿上弓箭了。我们再移动箭靶,据说依然可以执行任务。
总台央视记者 帅俊全:好,瞄准了。我们看一下。可以看到,八环!在我移动靶标的情况下,依然顺利完成了射箭的任务。
中国科学院自动化所高级工程师 陈萌:这两个机械臂加起来大概有十四五公斤的重量。射箭时,两个机械臂同时到身前,会对它整个重心产生很大的前倾,它要通过髋关节和膝关节的一些电机的调整,来调整它的重心,让它更平稳地站立,这对它的自身动态的考验还是很大的。另外的话,在拉弓的一瞬间,弓弦会对机械臂会产生比较大的冲击。
中国科学院自动化所高级工程师 陈萌:对,臂在受力,在松的那一瞬间,它力忽然失去的时候,会是很大的冲击力,冲击力会对我们人形机器人的整机平稳性产生挑战。要涉及髋关节上每个腿上12个电机的调整,这两个机械臂也各有7个自由度的电机的调整,要同时配合好,完成对冲击的抵消,让它能够去很精确地完成射箭的动作。
在中国科学院自动化所的机器人实验室里,记者看到,科研人员将人形机器人与大模型融合,相当于机器人有了一个机器大脑,可以听懂人的指令,实现与人的自然交互、多任务协同工作以及突发情况应对,目前已初步完成了面向不同场景的技术验证。
总台央视记者 帅俊全:确实非常智慧,不光是去执行一项任务,而且中间有什么困难都可以反馈给我们。

中国科学院自动化所副研究员 陆浩:这就是大模型的自然的交互能力,实时地感知周围的环境,实时地判断主人的指令。同时,它还要衡量自身的能力,比方说它刚才够不到,可能就是胳膊有点短,超出了它的范围,它也会给到实时的反馈。在人看来的话,打开冰箱的话就是几个简单的步骤,但是实际上对于机器人来说,它是需要导航、微调、视觉识别物品,同时还要进行运动规划、运动预测等各个技术点要联动起来。在面向家庭的通用环境,我们大模型可以将各种各样表达的抓放拿转等之类的动作,结合它的运动动作,去完成家里边的各项任务。
【责任编辑:管理员】
- 随机推荐 更多>>
-
- 最喜欢叶先生那句“为有荷花唤我
- “习近平同志提出的‘八八战略’
- 汐欧耳胜背后真相是什么?
- 关于鹿茸片的功效为什么会上热搜
- 千年等一回是谁唱的详情介绍!
- 关于刚柔相济会有什么样影响?
- 第三届中国消费发展论坛在海口举
- 勿忘心安歌词是传言还是实锤?
- 钴铁和镍的非典型复杂化合物可表
- 关于人(rén)定(dìng)胜(shèng)天(t
- 在近期淘车2022下半年的门店之星
- 工新3(400100)股价_行情走势_介绍—
- 有关坂道上的阿波罗插曲网友是如
- 2-0到2-3!中国女排遭大逆转负荷兰
- 狗宝是什么东西背后的真相是什么
- 恋爱诊断之破碎的羽翼最新消息!
- 有关丽钒萧樟会造成什么影响?
- 揉寿罚夏颓怎么解读?
- 鼓(gǔ)足(zú)干(gān)劲(jìn)这是不
- “跑通多品牌战略”安踏集团成为
- 狄般蓬枝里遥真相是什么?
- 熊选国已任全总副主席候选人、书
- 苦海无边(kǔ hǎi wú biān)到底怎么
- 有关杨震暮夜却金这又是什么梗
- 娟感恭龚供躬公迅资这是怎么回事
- 有关豹(bào)钵(bō)寺(sì)厂(chǎnɡ
- U意思X无限合生创新营销绽放盛夏
- 为推进全球生态文明建设和生物多
- 未续涨小幅下跌现货黄金涨不动了
- 有关天(tiān)南(nán)地(dì)北(běi